スタンフォード大学ソフトウェア SU2 を使用した翼の設計最適化
スタンフォード大学非構造化校(SU)2) は、C++ プログラミング言語で書かれたオープンソースのツール セットです。 偏微分方程式 (PDE) に関連する問題を数値的に解決するように設計されており、PDE 制約付きの最適化問題に特に適しています。 数値流体力学 (CFD) と空気力学的形状の最適化は、コードの初期開発の推進に影響を与えましたが、電気力学、線形弾性、熱伝達、化学反応の流れなど、他のいくつかの分野でも有用であることが証明されています。 スタンフォード大学航空宇宙学部の航空宇宙設計研究所 (ADL) は、SU の開発を積極的に行っています。2、そして他者からの外部貢献は、彼らの活動を通して奨励されています。 GitHubの リポジトリ。
計算解析ツールは、学術界と商業環境の両方、特に航空宇宙産業における研究、設計、製品開発に不可欠な部分です。 ただし、ほとんどの確立された信頼性の高いコードのソース コードへのアクセスは、独自のものであるか、法外に高価であるか、またはアクセスできないかのいずれかです。 同様に、シミュレーションを実行するために不可欠なコンピューティング リソースの調達と維持も、エンドユーザーが直面するもう XNUMX つの障壁です。 この問題を克服するために、SU2 チームは、オープンソースで使いやすく正確なフロー ソルバーを提供します。 SU を使用して、スケーラブルなオンデマンドのエンタープライズクラスのコンピューティング プラットフォームを顧客に提供します。2 利用可能な計算ツールの中に。
SU をデモンストレーションするには2の空力形状最適化機能を利用して、半対称の ONERA M6 翼モデルの圧力抗力を最小限に抑えるために、非粘性の揚力制約設計の最適化を実行しました (図 1a および 1b)。
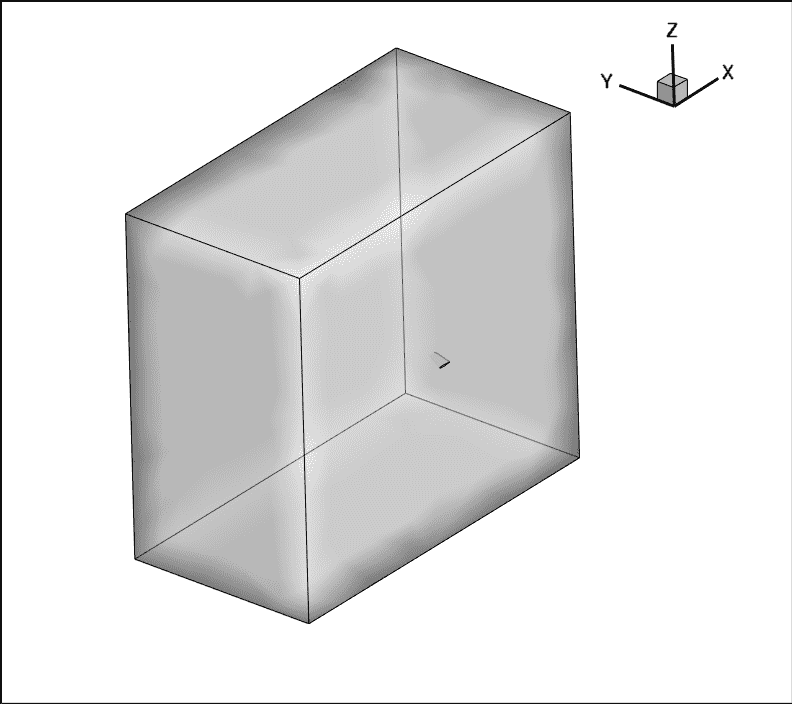
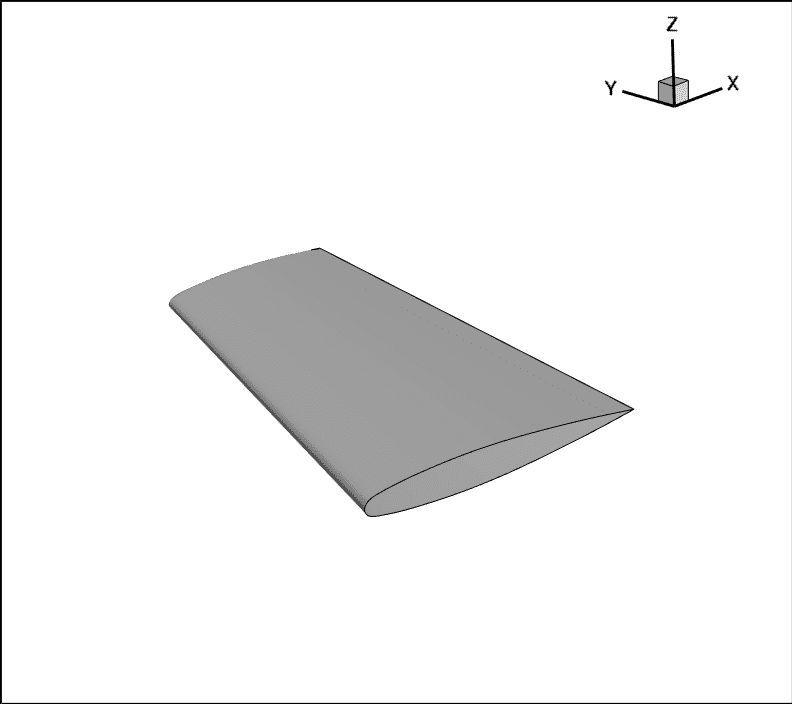
ONERA M6 翼は、1972 次元の高レイノルズ数の流れを研究するための実験幾何学として ONERA 空気力学部門によって XNUMX 年に設計されました。 この広く知られている翼の形状は、経験的なデータと興味深い流れの特徴が利用できるため、新しい数値手法や CFD コードを検証するための参照モデルとして機能します。 この設計最適化に使用される解析モデルの表面メッシュが示されています。
設計プロセスの目的は、抗力係数 (CD)翼のスパンに沿って翼形部のセクションの形状を変更することによって。 一連の制御点は、翼の上面に垂直な方向に自由に移動できる設計変数として定義されました。 さらに、シミュレーションを制御するために、次のように一連の条件が規定されました。
圧力: P0 = 2116ポンド/フィート2
温度:℃0 = 32°F
マッハ数:M0 = 0.8395
迎え角: α = 3.06°
参照領域: A = 8.16 フィート2
揚力係数:CL ≥0.285
誘導抗力は抗力全体の重要な要素であるため、抗力の最小化では揚力係数を制限することが適切です。 したがって、揚力を減らすだけで総抗力を減らすことができます。 解決策は、直接流れ問題を解決し、続いて連続随伴問題を解決することによって進められます。 次に、目的関数の勾配 (この例では圧力抗力) が、制御点または設計変数の移動に関して計算されます。 設計の反復ごとに、オプティマイザは、計算された勾配に基づいて、所定の目的関数を最小化し、リフトを維持するために形状変更を推進します。 シミュレーションでは、3 の設計サイクルを実行し、以下の図 3a、4b、および XNUMX に示す結果を観察しました。
圧力: P0 = 2116ポンド/フィート2
温度:℃0 = 32°F
マッハ数:M0 = 0.8395
迎え角: α = 3.06°
参照領域: A = 8.16 フィート2
揚力係数:CL ≥0.285
誘導抗力は抗力全体の重要な要素であるため、抗力の最小化では揚力係数を制限することが適切です。 したがって、揚力を減らすだけで総抗力を減らすことができます。 解決策は、直接流れ問題を解決し、続いて連続随伴問題を解決することによって進められます。 次に、目的関数の勾配 (この例では圧力抗力) が、制御点または設計変数の移動に関して計算されます。 設計の反復ごとに、オプティマイザは、計算された勾配に基づいて、所定の目的関数を最小化し、リフトを維持するために形状変更を推進します。 シミュレーションでは、3 の設計サイクルを実行し、以下の図 3a、4b、および XNUMX に示す結果を観察しました。
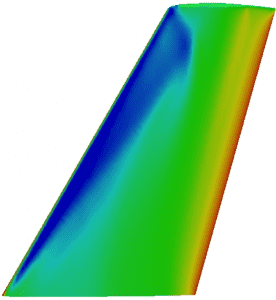

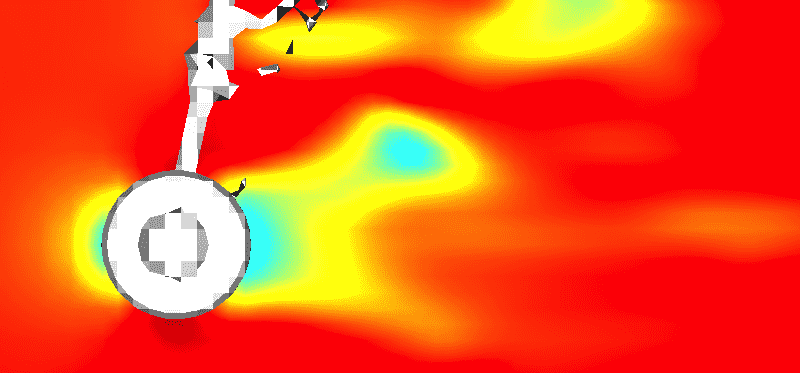
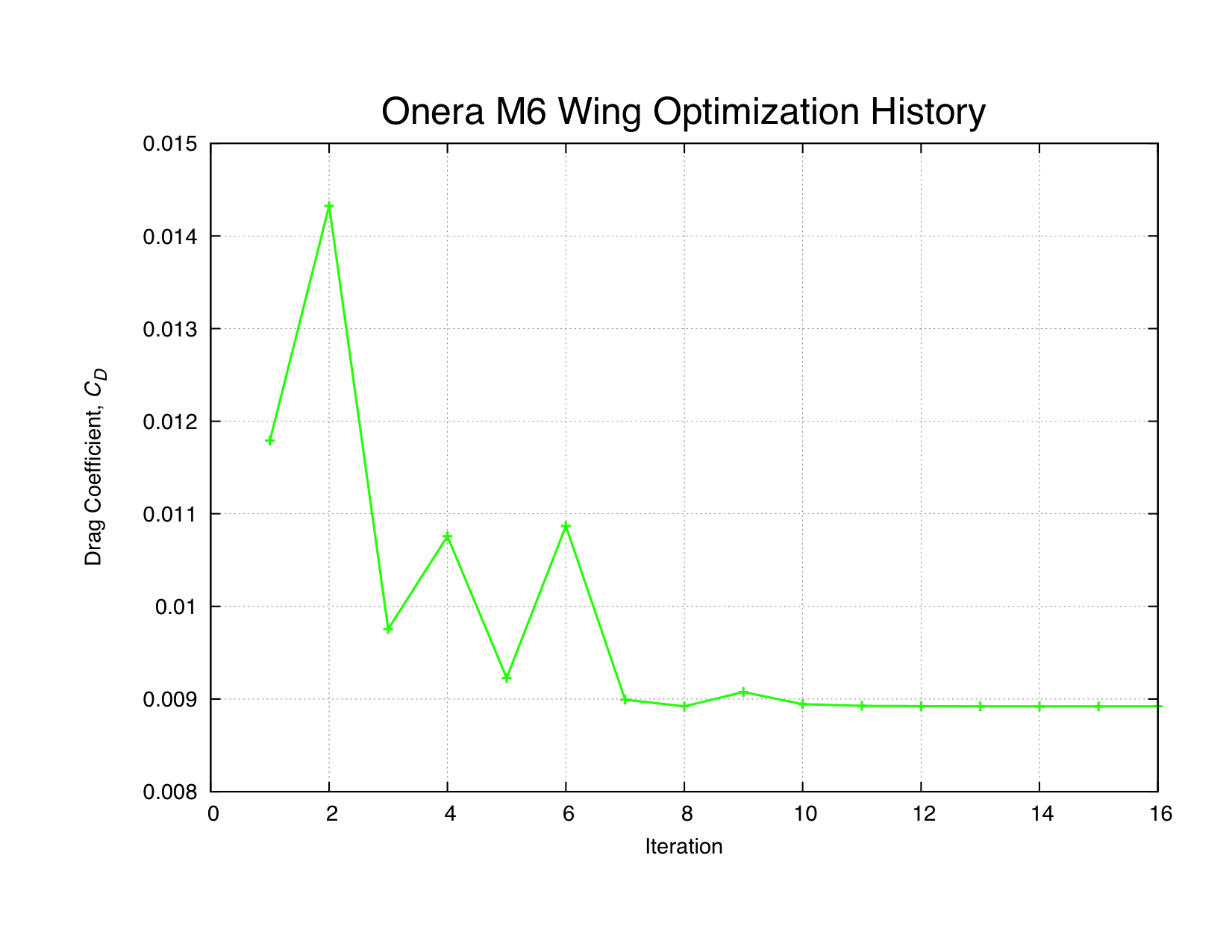
翼上面の圧力等高線の比較を図 3a と 3b に示します。 最初の直接フロー ソリューションが、形状最適化の最終反復の結果と比較されます。 最初の衝撃のさらに下流での XNUMX 番目の衝撃波に伴う急激な圧力上昇は、ほぼ解消されました。 抗力係数 C のプロットD設計サイクルの反復を伴う図 4 は、形状最適化の過程で圧力抗力がおよそ 0.0118 から 0.0089 に減少する様子 (24.6% の減少) を示しています。
SUについて詳しくはこちら2、スタンフォード大学の Web サイトにアクセスしてください。 https://su2.stanford.edu。 SU からの直接フィードバックが得られるアクティブなユーザー コミュニティ2の開発者が利用可能です ここ。 SU のセットアップと実行に関する情報2 Rescaleについては、こちらまでお問い合わせください。 .