予測の未来を予測する
Clayton Grow、PE、アカウント エンジニア
コンバージェント・サイエンス株式会社
メル・ブルックスと動きのパラドックス
"私たちはできるやめないでください。 それは危険すぎる。 私たちはまずは速度を落とさなければなりません!
–メル・ブルックスの映画のサンダース大佐は、 スペースボール (1987)
これは、メル・ブルックスのスクリューボール/SF パロディ映画の中で私のお気に入りのセリフの 1 つです。 しかし、長い間、その理由が分かりませんでした。 その後、哲学入門の授業でゼノンの「二項対立のパラドックス」について話しました。 要するに、地点 A から地点 B に移動するには、まずそこから 2/1 移動する必要があるということです。 しかし、そこへ半分の距離を移動するには、まずそこへの道のりの 2/1 を移動する必要があります。 ただし、道の 4/1 を移動するには、まず 4/1 移動する必要があります… 不条理な削減。
この愚かなセリフは、逆の二分法パラドックスに似ていることに気づきました。停止するには、1/2 速度まで減速する必要があります。 しかし、その前に、3/4 速度、7/8 速度、15/16 速度に減速する必要があります…おそらくメル ブルックスは、このセリフで哲学的な難問に注意を引くつもりはなかったのでしょうが、確かにそれは確かです。逆説、不条理、ユーモアの関係に心を開いてくれました。
アキレスと亀、そしてパラドックスへの解決策
では、動きは幻想なのでしょうか? もちろん、この可能性には当惑したので、この問題について他の人の意見を調べました。 私のお気に入りの説明は、思いがけないところにありました。有名な児童書の著者によるエッセイです。 不思議の国のアリス。 ルイス・キャロルは、エッセイ「アキレスに亀が言ったこと」(二項対立のパラドックスから近い帰結であるゼノンの「アキレスと亀」のパラドックスに基づく)の最初の数行で、実践的な解決策を紹介しています。
アキレスは亀を追い越し、その背中に快適に座っていました。
「それで、もう私たちのレースコースの終わりまで来たのですか?」 亀は言いました。 「それは無限の距離の連続であるにもかかわらず? 誰かの知恵者か誰かが、そのことは不可能であることを証明したと思ったのだろうか?
「それはできるよ」とアキレスは言った。 「できました! ソルビトゥール アンブランドに設立された地域オフィスに加えて、さらにローカルカスタマーサポートを提供できるようになります。」
ソルビトゥール アンブランド 「それは歩くことで解決される」という意味のラテン語のフレーズです。 このフレーズの一般的な使用法は、「問題は実際の実験によって解決される」です。
言い換えれば、最初に通過する必要がある短い距離が無数にあるとわかっている場合、どうやって地点 A から地点 B まで移動できるのでしょうか? シンプル…歩き始めるだけです。
解決策のパラドックス
ソルビトゥール アンブランド ただし、証明するよりも実行するのは簡単です。 点 B がどの方向にあるかがわからない場合はどうすればよいでしょうか? 最初の一歩が遠すぎる場合はどうすればよいでしょうか? 点 B が移動ターゲットの場合はどうなるでしょうか?
物事はすぐにベタベタになります。
解決策のパラドックスに対する解決策: 予測
同じ概念が数値流体力学にも当てはまります。 私たちは、シミュレーションが解決策、より正確には、精緻な解決策の体系に向かって進むことを望んでいます。 各タイムステップにおける、ドメイン内のさまざまな位置における速度、圧力、温度、種の濃度などを知る必要があります。
この精緻なシステム内でこれらの各ソリューションを達成するための最初のステップは何でしょうか? 確かに、ただランダムな方向に歩き始めることはできません。 しかし、ただ立ち止まっているわけにもいきません。 そこでまずは見積りから始めます。
状態の予測: PISO アルゴリズム
各時間ステップでの各条件を体系的に解決するために、Convergent Science の革新的な CONVERGETM CFD ソルバーは、PISO アルゴリズムと呼ばれるアルゴリズムを使用します。 Pレッティ I興味深い S科学的な Oペレーション。 (ただし、真剣に、PISO アルゴリズムについてさらに詳しく知りたい場合は、RI Issa の魅力的な、そして頻繁に引用されている記事のコピーを入手してください。「演算子分割による暗黙的な離散流体流方程式の解法」 計算物理学ジャーナル、第 62 巻、1986 年)。
物事を単純化しすぎる危険を承知で、PISO アルゴリズムについて次のように考えることができます。地図を見てハイキングを開始し、ランドマークの位置に基づいて歩く方向を選択します。 少し歩いた後、周囲のランドマークを再確認します。 ランドマークが地図上の予想位置と一致しない場合は、地図上の自分がいるとわかっている場所に基づいてコースを変更し、目的地に到着するまで繰り返します。
PISO ループはユーザー定義の初期条件から始まり、それを使用して運動量方程式を解く「予測子」ステップを実行します。 次に、アルゴリズムは圧力方程式を導出して解き、それを使用して「補正」ステップを実行し、この「補正」を運動量方程式に適用します。 予測し、修正し、繰り返します。
解像度の予測: アダプティブ メッシュ リファインメント
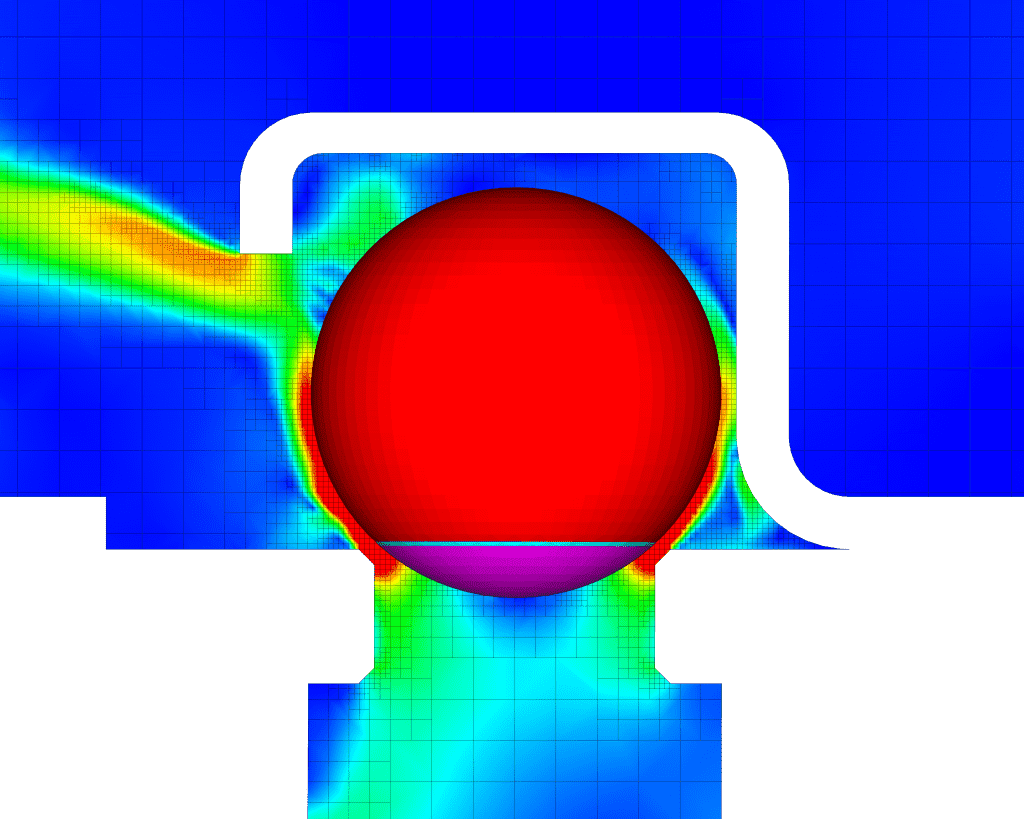
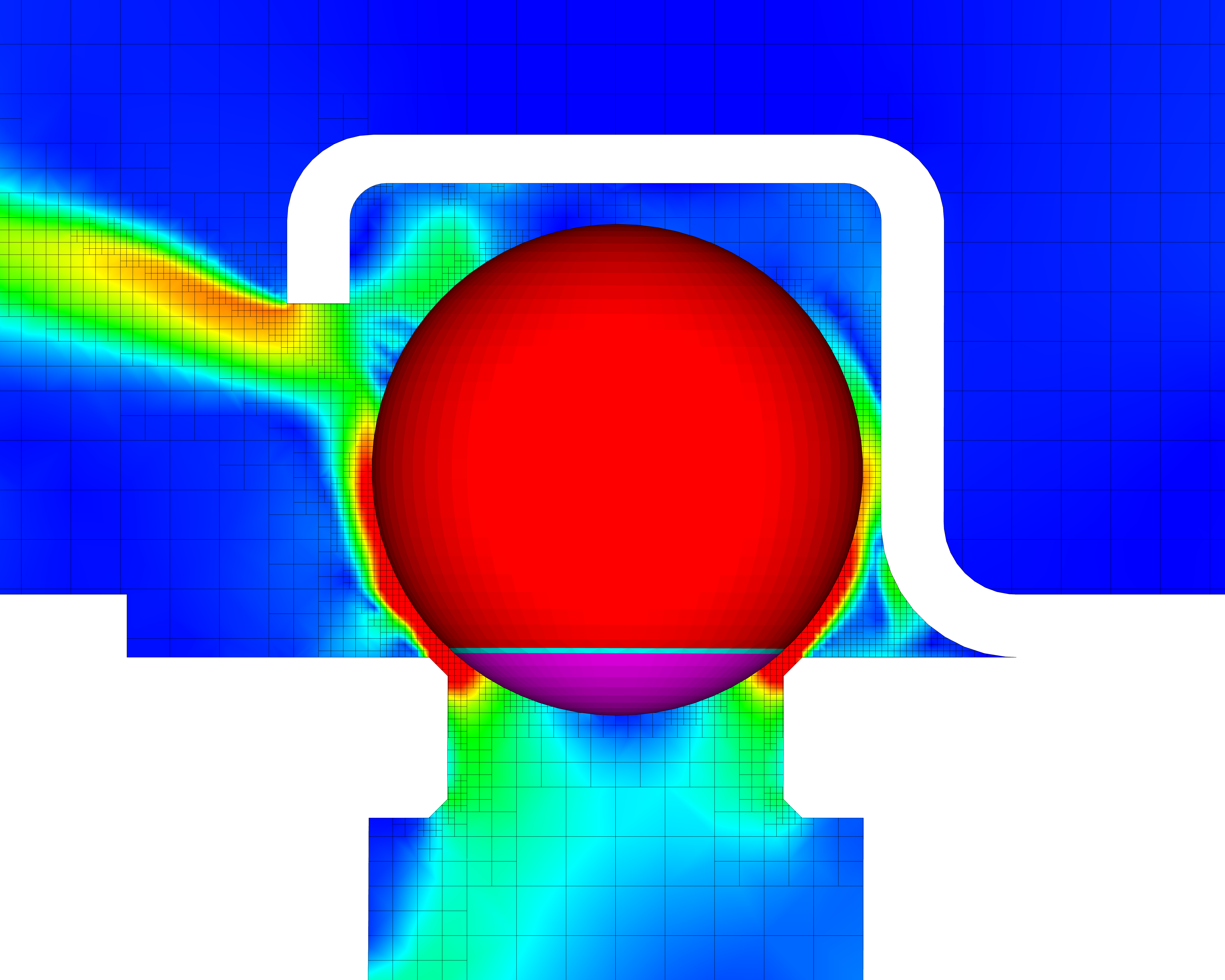
CONVERGE を非定常シミュレーションに独特に活用できる機能は、適応メッシュ リファインメント技術 (AMR) です。 この手法では、PISO アルゴリズムと同様の概念が使用されます。AMR は、既存の条件フィールドを調べて、サブグリッド スケールの大きさを推定します。
このサブグリッド スケールのマグニチュード推定値は、基本的に、これらの条件における勾配の知識に基づいた推測です。 勾配がユーザー指定の「サブグリッド スケール」値より大きい場合、AMR は勾配が十分に小さくなるまで、またはユーザー定義の最大セル数に達するまで改良を加えます。 ユーザーによるメッシュ作成を必要とせずに、自動的に予測、調整、繰り返しが行われます。
予測の未来
CFD の創設以来、コンピューターには答えを予測するタスクが割り当てられてきました。 しかし、多くの CFD ユーザーは、正確な答えを得るために必要なメッシュの細分化を予測するという負担を負っています。 これは面倒でイライラするプロセスになる可能性があります。
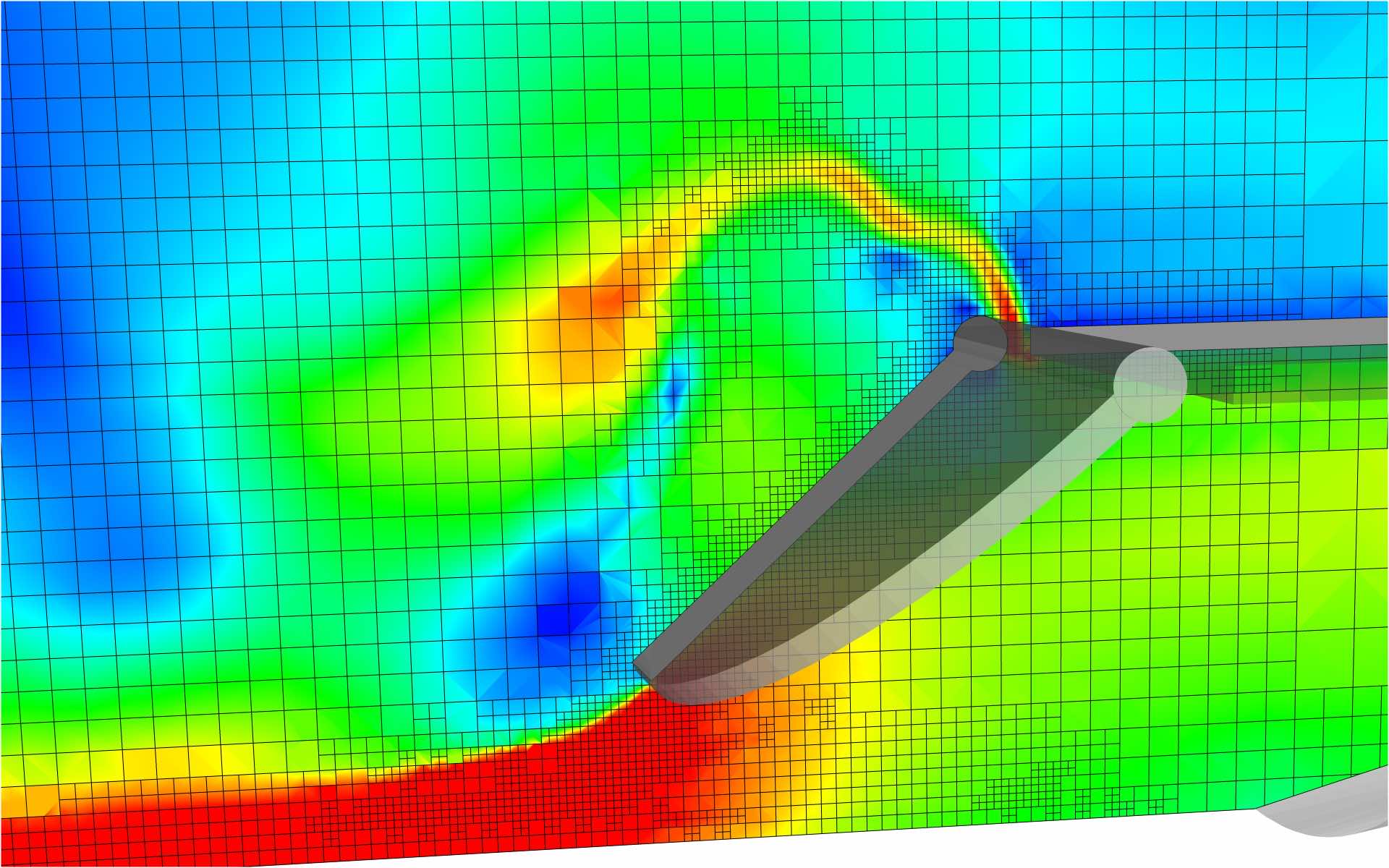
高性能計算リソースの可用性、手頃な価格、効率性の向上に伴い、自動適応メッシュを使用して複雑な流れ現象を予測することが CFD の現在および将来であることは明らかです。 CONVERGE の自動デカルト カットセル メッシュ作成と完全に結合されたアダプティブ メッシュ リファインメントにより、このメッシュ リファインメント タスクは最終的にコンピュータに委任されます。 複雑な流れが考えられる領域のメッシュを予測して手動で調整する必要はもうありません。 CONVERGE の AMR は、実行時にメッシュを自動的に調整して適応させ、この複雑なフローをキャプチャします。
社内クラスターの有無に関係なく、すべての CFD ユーザーが高性能の計算リソースを利用できるようになりました。 クラウドでの CONVERGE の使用TM Rescale クラウド コンピューティング サービスでは、予測の未来はクラウドにあります。
クラウドで統合TM Rescale サーバー上: 予測の力を活用しましょう!
アカウントを作成し、クラウドで CONVERGE の実行を開始しますTM リスケールで。