
LS-DYNA
Rescale は、LS-DYNA ジョブを実行するための簡単なコマンドライン インターフェイスを提供します。 ここでは、XNUMX つの異なる方法で LS-DYNA を実行するためのコマンドについて説明します。 ソルバーは、数値アルゴリズムまたはソフトウェア ツールです。 その他 モード:
- 共有メモリ並列 (SMP)
- 分散メモリ並列 (DMP)
別名メッセージ パッシング パラレル (MPP) - ハイブリッドMPP
各ソルバーには、正常に実行するために異なる引数の要件があります。 以下の例は、次の XNUMX つの異なるソルバー モードのテンプレートを示しています。
-i 入力ファイルの引数です
-p は精度の浮動小数点です
-n DMP ランク引数です
-s SMP スレッド引数です
注: 以下の例では、拡張子を含む入力ファイル名に置き換えてください。 括弧< >は必ず外してください。
SMPモード
SMP モードで実行する場合は、単一のモードでジョブを設定します。 従来のコンピューティングでは、ノードはネットワーク上のオブジェクトです。 ... その他 ハードウェアの。 これにより、ジョブが SMP として自動的に実行されます。 複数のコアで SMP モードを強制する場合は、次のコマンド テンプレートに従います。
ls-dyna -s $RESCALE_CORES_PER_SLOT -i -p
ここで注意してください。 RESCALE_CORES_PER_SLOT SMP スレッドの数としての環境変数。これは常に単一ノードのコアの数です。 コンピューティング クラスターは、緩やかまたは緊密な一連のコンピューティング クラスターで構成されます。 その他.
DMPモード
走り込みたいなら DMP ジョブは次のコマンドでのみ実行できます。
ls-dyna-i -p
この場合、DMP ランクの数はハードウェアの選択から自動的に取得されることに注意してください。
単精度のコマンドは次のとおりです。
ls-dyna-i -p シングル
倍精度のコマンドは次のとおりです。
ls-dyna-i -p ダブル
ハイブリッドモード
を指定するコマンド ハイブリッド並列化 構成は次のとおりです:
ls-dyna-n -s -私-p -a
コラボレー
-n DMP ランク引数です
-s SMP スレッド引数です
たとえば、16 コア (16 smp スレッド) でジョブを起動する場合、それぞれ 8 コア/スレッド (2/16 = 8) を持つ 2 つのノード (dmp ランク) を用意することで、ハイブリッド並列化構成を指定できます。 -n 8 -s 2
LS-DYNA ジョブの完全なコマンドは次のとおりです。
ls-dyna-n -s -私-p -a
追加のコマンド ライン オプションは、 -a コマンドラインにフラグを設定します。 これらの追加の引数は、LS-DYNA 実行可能ファイルに直接渡されます。
特定の実行のメモリ使用量を指定する必要がある場合は、次のようにします。
ls-dyna -i input.k -p single -a "メモリ = 600m メモリ 2 = 60m"
or
ls-dyna -i input.k -p single -a "memory=30000memory2=20000 p=my-pfile"
メモリ: ヘッドプロセッサによって最初に分解されるために使用されるメモリ。 システムの数値的、記号的、または論理的表現... その他
Memory2: 分解された問題を解決するためにすべてのプロセッサによって使用されるメモリ (ヘッド ノードを含む)
pfile は、 -a コマンドラインにフラグを設定します。 例えば:
ls-dyna -i input.k -p single -a "p=my-pfile"
仮想マシンの bash インターフェイスにアクセスしたら、次のコマンドを使用して正しいフォルダーに移動してください。 cd work/shared。 次に次のコマンドを入力してください echo <switch> > d3kil、置き換える <switch> 実行したいスイッチコマンドを入力します。 例えば: echo sw2 > d3kil
d3kil ファイルは実行されると消費され、削除されることに注意してください。
LS-DYNA のセンス スイッチとその応答のリストは次のとおりです。
- sw1 – 再起動ファイルが書き込まれ、LS-DYNA が終了します (クラスターはシャットダウンします)。
- sw2 – LS-DYNA は時間とサイクル番号で応答します (ls-dyna.log に出力)
- sw3 – 再起動ファイルが書き込まれ、LS-DYNA が継続します
- sw4 – プロット状態が書き込まれ、LS-DYNA が継続します
- swa – LS-DYNA はすべての出力 I/O バッファをフラッシュします
- stop/quit – 実行を停止します (クラスターはシャットダウンします)
ドロップダウン メニューにないバージョンの LS-DYNA を使用する必要がある場合は、入力ファイルとともにビルド ファイルを Rescale ジョブにアップロードし、 カスタムバージョン.
LS-DYNA のビルドが次であることを確認してください。
- 64ビットLinux
- MPP バージョン
手順は以下の通りです。
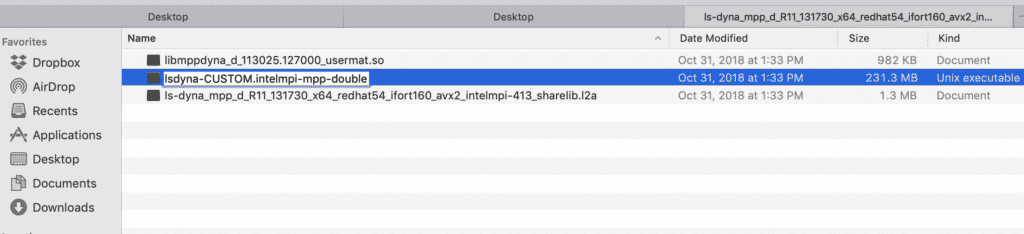
- カスタム ビルド ファイルをコンピュータにダウンロードする
- ビルドファイルが置かれているフォルダーに移動します
- 実行可能ファイルを特定し、名前を変更します。
カスタム ビルドが機能するには、実行可能ファイルの名前を次のように変更する必要があります。 lsdyna-CUSTOM.<mpi-flavor>-mpp-<precision>。 例は次のとおりです。 lsdyna-CUSTOM.platformmpi-mpp-single カスタム ビルドが、指定した mpi フレーバーに対応していることを確認してください。対応していない場合、ジョブは失敗します。
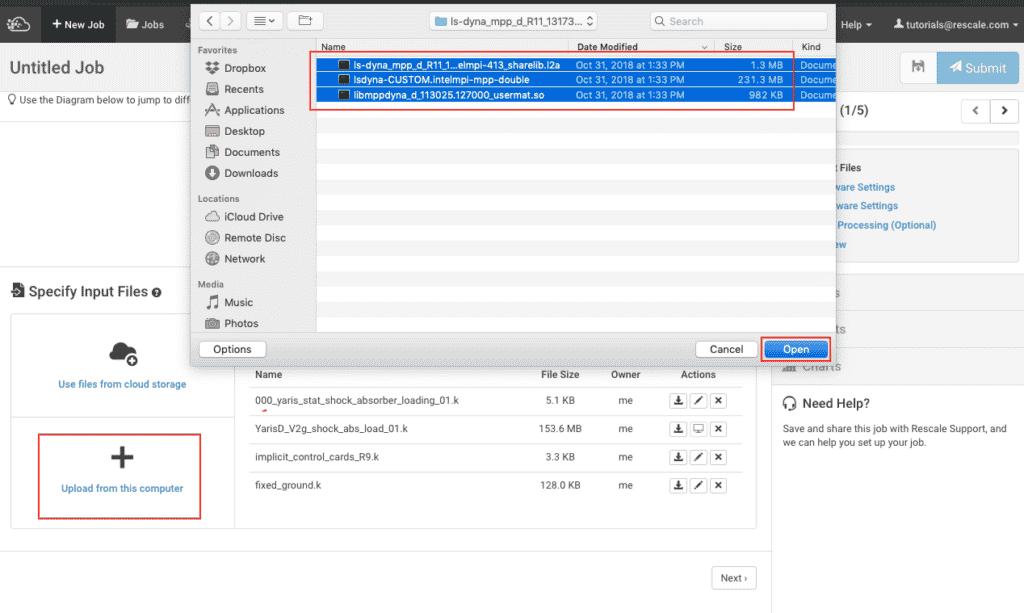
Rescale プラットフォームで、ビルド ファイルと入力ファイルをジョブにアップロードします。
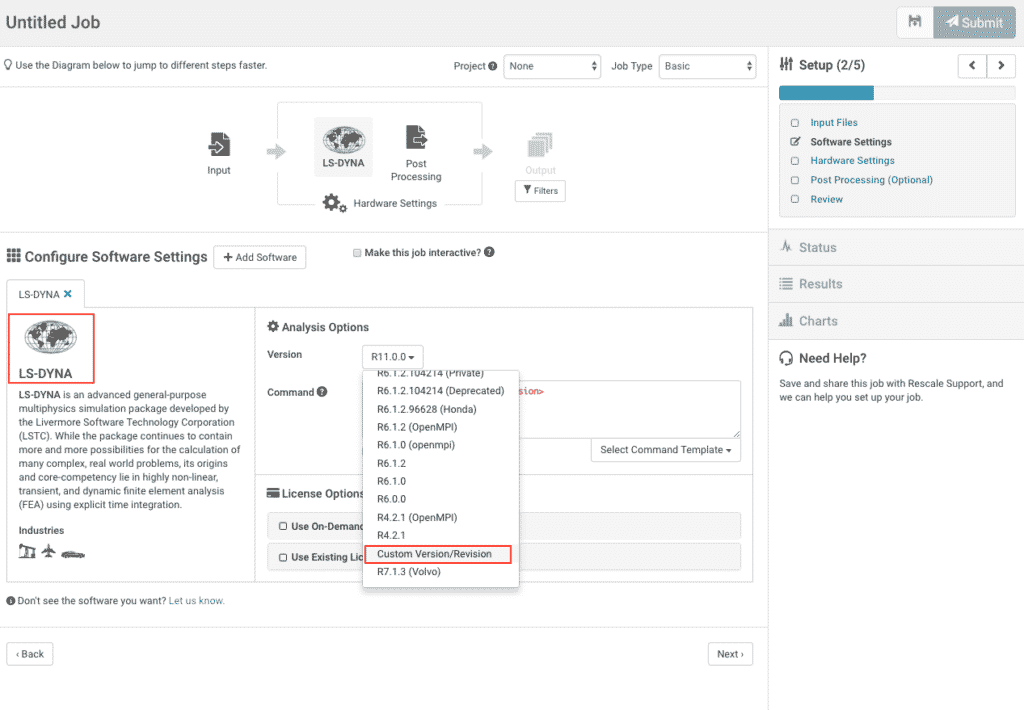
- ソフトウェア設定ページで、下図のように ソフトウェア ページで、選択LS-DYNA
- を選択し、カスタム バージョン/リビジョン
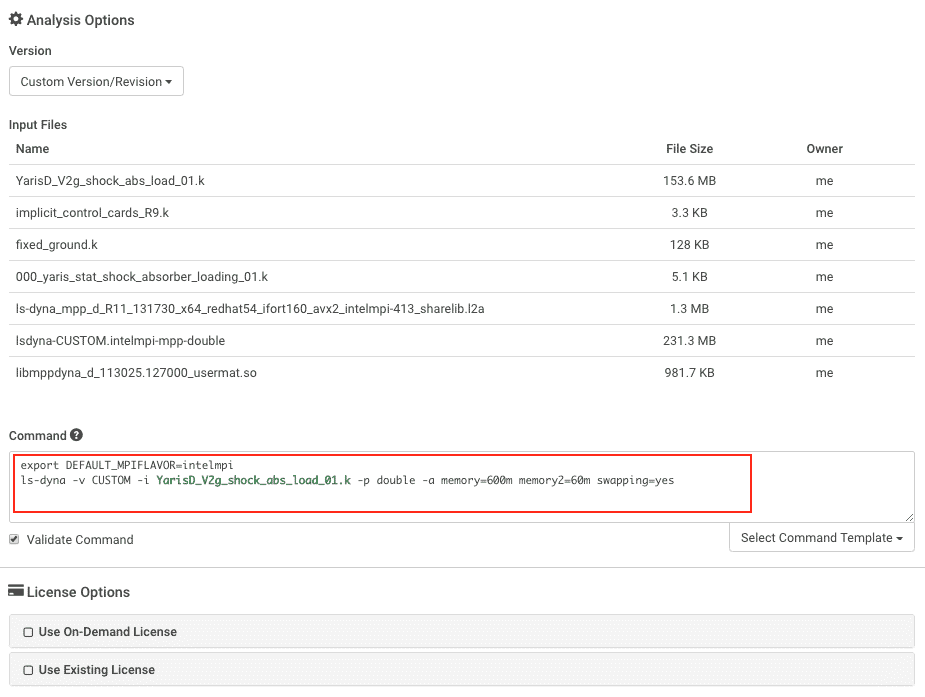
- コマンド ウィンドウで次のように指定します。
エクスポート MPI_FLAVOR=intelmpi ls-dyna -v -私-p -a
例:
export MPI_FLAVOR=intelmpi ls-dyna -v CUSTOM -i YarisD_V2g_shock_abs_load_01.k -p double -a メモリ=600m メモリ2=60m スワッピング=はい
この例では:
MPI フレーバー カスタムビルドの場合は Intel mpi
入力ファイル is YarisD_V2g_shock_abs_load_01.k
精度 is doublememory モデルを最初に分解するためにヘッド プロセッサによって使用されるメモリ (MB) です。memory2 分解された問題を解決するためにすべてのプロセッサによって使用されるメモリ (MB) (ヘッド ノードを含む)
コマンド ウィンドウのこれらのフィールドをジョブに合わせて置き換えます。
これで、ジョブがカスタム LS-DYNA バージョンで実行されるようになります。